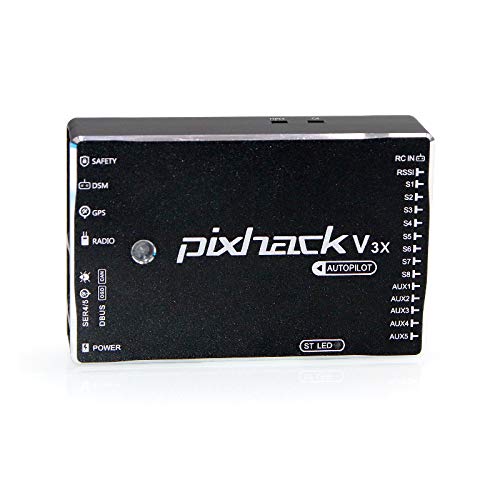



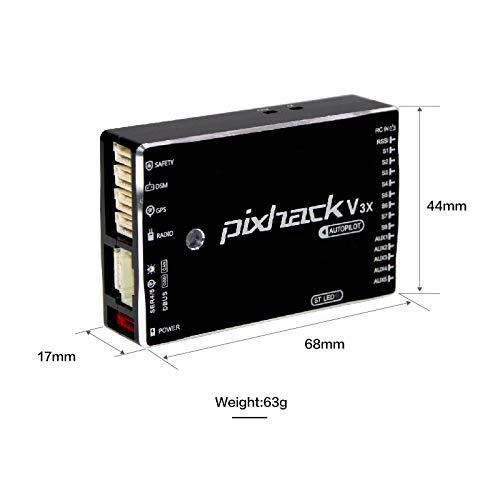



Pixhack v3 is an advanced autopilot designed and made in CUAV . The board is is based on the FMUv3 open hardware design. It is fully compatible with PX4 and ArduPilot. intended primarily for academic and commercial develop. Applicable model: plane\copter\helicopters\VTOL\unmanned vehicles unmanned boats. Powerful processor Based on STM32F427 (180MHZ) master and STM32F100 coprocessor. Redundant design Built-in 3 IMU Redundant Designs (includes 3 accelerometers, 3 sets of gyroscopes, 1 sets of electronic compass, 2 sets of digital barometers) Supports 3 sets of power supply redundant switching The built-in sensor data fusion mechanism and failover mechanism in the software greatly reduce the chance of crashes caused by flight control. Enrich extension Scalable 1 set of electronic compass, 1 smart battery, 2 sets of NMEA or UBX standard GPS, CAN bus device (ESC), 2 I2C devices (smart battery, status light, optical flow smart camera, laser sensor, ultrasonic sensor, etc. Built-in shock absorber system Separate design of sensor and main board, built-in high-performance shock absorption system, a variety of severe model environment, better adaptability Built-in IMU temperature automatic compensation system Pixhack V3 recently is designed a digital temperature control system to keep the sensor in a constant temperature environment in order to adapt to a more severe low temperature environment.
Trustpilot
5 days ago
1 month ago
